【kết quả cúp c2 châu âu hôm nay】Trung Quốc huấn luyện robot nhảy như mèo để khám phá các tiểu hành tinh
Các nhà khoa học Trung Quốc sử dụng AI huấn luyện cho robot cách điều chỉnh tư thế giữa không trung như loài mèo,ốchuấnluyệnrobotnhảynhưmèođểkhámphácáctiểuhàkết quả cúp c2 châu âu hôm nay để có thể di chuyển trên bề mặt tiểu hành tinh.
Lấy cảm hứng từ khả năng xoay người và tiếp đất của loài mèo, nhóm nghiên cứu tại Viện Công nghệ Cáp Nhĩ Tân (Trung Quốc) vận dụng phương pháp học tăng cường (RL) - một loại trí tuệ nhân tạo (AI) - để huấn luyện robot điều chỉnh tư thế trên không khi nhảy qua các bề mặt gồ ghề, trọng lực thấp trên các tiểu hành tinh.
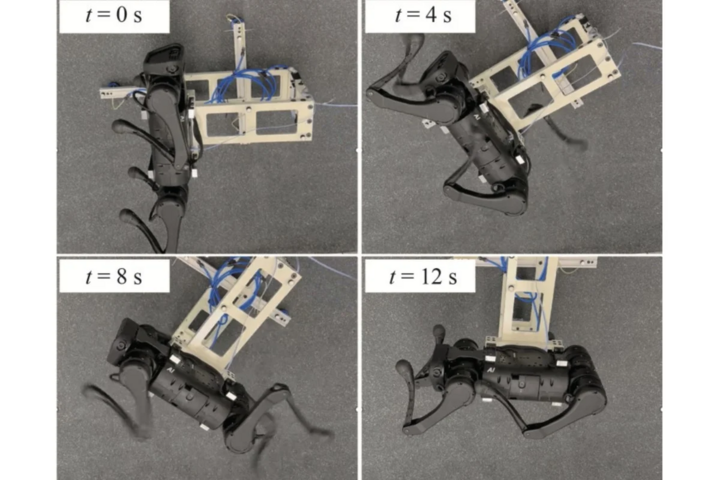
Nhóm nghiên cứu Trung Quốc huấn luyện robot bốn chân cách điều chỉnh tư thế và tiếp đất như loài mèo để di chuyển trên bề mặt tiểu hành tinh. (Ảnh: SCMP)
Không giống các hệ thống truyền thống dựa vào phần cứng ổn định chuyên dụng nhưng nặng nề, robot sử dụng hệ thống điều khiển “phi mô hình” để di chuyển bốn chân theo chuyển động phối hợp. Điều này cho phép robot điều chỉnh độ nghiêng và định hình lại hướng di chuyển ngay trên không trung, theo báo cáo của các nhà nghiên cứu đăng tải trên Tạp chí Du hành Vũ trụ.
Nghiên cứu đã giải quyết một thách thức quan trọng với thao tác nhảy của robot khi di chuyển trên các tiểu hành tinh, nơi môi trường có trọng lực thấp và chỉ cần một chút mất cân bằng về lực ở chân cũng có thể khiến robot quay không kiểm soát, tiếp đất thất bại, hoặc bật khỏi bề mặt hoàn toàn.
“Trong môi trường trọng lực thấp của các tiểu hành tinh, robot trải qua những giai đoạn rơi tự do kéo dài trong mỗi lần nhảy. Việc tận dụng thời gian này để điều chỉnh độ lệch do cú nhảy gây ra là rất quan trọng, nhằm đảm bảo tiếp đất an toàn hoặc thay đổi góc xoay để điều chỉnh hướng di chuyển”, nhóm nghiên cứu cho biết trong báo cáo.
“Một nền tảng mô phỏng vi trọng lực được thiết kế và xây dựng, qua đó kiểm chứng độ hiệu quả của cách thức nhảy này thông qua các thí nghiệm trên nguyên mẫu robot bốn chân”,nhóm nghiên cứu cho biết thêm.
Các tiểu hành tinh là tàn tích của quá trình hình thành hệ Mặt trời và nắm giữ chìa khóa để giải mã nguồn gốc của nó. Chúng cũng giàu tài nguyên như bạch kim và các kim loại quý hiếm khác, có thể hỗ trợ cho việc thám hiểm không gian trong tương lai và các ứng dụng công nghiệp.
Thách thức trên bề mặt tiểu hành tinh
Cho đến nay, các cơ quan vũ trụ ở Châu Âu, Nhật Bản và Mỹ đã hạ cánh thành công tàu vũ trụ trên các tiểu hành tinh để lấy mẫu, nhưng chưa có nhiệm vụ nào triển khai xe tự hành có khả năng thám hiểm bề mặt lâu dài.
Các xe tự hành có bánh xe truyền thống, như những chiếc sử dụng trên Mặt trăng và sao Hỏa, gặp nhiều thách thức trong môi trường tiểu hành tinh vì lực hấp dẫn yếu, thường chỉ bằng vài phần nghìn lực hấp dẫn của Trái đất, không tạo đủ lực kéo để bánh xe hoạt động hiệu quả.
Để giải quyết những hạn chế này, các nhà khoa học đã đề xuất sử dụng robot nhảy cho các nhiệm vụ trong tương lai, nhưng điều đó lại nảy sinh một loạt thách thức mới.
Mỗi lần nhảy, robot sẽ ở trên không trung trong khoảng 10 giây hoặc lâu hơn, đủ lâu để lực chân mất cân bằng khiến robot quay không kiểm soát hoặc thậm chí bật ra khỏi bề mặt và trôi vào không gian.
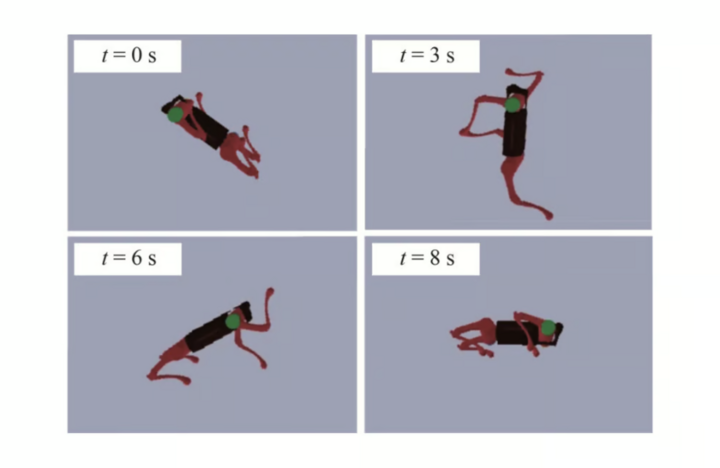
Nhóm nghiên cứu ở Cáp Nhĩ Tân đã sử dụng phương pháp RL để huấn luyện robot trong mô phỏng ảo. Trong hơn bảy giờ, AI học và rút kinh nghiệm từ những sai sót trong thử nghiệm nhằm tinh chỉnh chuyển động của mình để có thể tiếp đất ổn định. Hệ thống AI của robot chứng minh khả năng điều chỉnh hướng của mình, bao gồm độ cao (nghiêng về phía trước hoặc sau), độ nghiêng (nghiêng sang hai bên) và độ lệch (góc quay), chỉ trong vài giây.
Ví dụ, khi phóng về phía trước với độ nghiêng lớn lên tới 140 độ, robot có thể ổn định lại tư thế trong vòng 8 giây. Nó cũng có thể xoay giữa không trung tới 90 độ để đổi hướng di chuyển.
Robot được đào tạo bằng cách sử dụng phương pháp học tăng cường. (Ảnh: SCMP)
Để xác thực độ hiệu quả của hệ thống, các nhà nghiên cứu đã xây dựng nền tảng mô phỏng môi trường vi trọng lực cho phép robot "trôi" trên bề mặt gần như không có ma sát.
Nhóm nghiên cứu cho biết, mặc dù chỉ giới hạn ở chuyển động hai chiều, các thí nghiệm đã xác nhận tính hiệu quả của hệ thống và củng cố kết quả từ các mô phỏng.
Ngoài ra, các nhà khoa học nhận thấy quá trình này yêu cầu rất ít sức mạnh tính toán của robot. Thiết kế nhẹ nhàng và tiết kiệm năng lượng của hệ thống đặc biệt phù hợp cho các nhiệm vụ thám hiểm không gian sâu.
Trong tương lai, hệ thống này có thể ứng dụng rộng rãi, từ khám phá khoa học đến khai thác tài nguyên trên các tiểu hành tinh. Tuy nhiên, nhóm nghiên cứu cho biết cần thêm nhiều nghiên cứu để cải thiện khả năng thích ứng của AI với các địa hình và môi trường đa dạng.
Hoa Vũ(Nguồn: SCMP)(责任编辑:Cúp C1)
下一篇:Lào Cai: Điều động, bổ nhiệm Chánh văn phòng tỉnh uỷ giữ chức Bí thư huyện Bảo Yên





- ·Ký kết Quy chế phối hợp triển khai, thực hiện tiết kiệm điện
- ·Phil Foden chói sáng, Pep Guardiola khen hết lời rồi... chê!
- ·Liverpool, Arsenal thất bại và vận may Man City ở Premier League
- ·Kết quả bóng đá Brentford 1
- ·Hỗ trợ các doanh nghiệp Canada tìm hiểu thông tin đầu tư tại Việt Nam
- ·Bạc Liêu: Vì sao hàng loạt doanh nghiệp bị cưỡng chế tài khoản?
- ·Nhận định bóng đá Chelsea vs MU: Ánh sáng nơi cuối đường hầm
- ·Xác nhận hạn ngạch tôn màu NK qua dịch vụ công trực tuyến
- ·Thủ tướng Chính phủ ra công điện chỉ đạo ngăn ngừa, xử lý ngộ độc thực phẩm
- ·Lấy vé tứ kết giải châu Á, thầy trò HLV Hoàng Anh Tuấn làm điều đặc biệt




- ·Giá vàng tăng phi mã, có hút tiền từ tiết kiệm?
- ·Leverkusen vô địch Bundesliga, Xabi Alonso nói gì giải lời nguyền
- ·Man City thắng 4 sao: Vũ điệu Phil Foden
- ·Thêm 15 ngân hàng triển khai nộp thuế điện tử
- ·Bỏ túi kinh nghiệm du lịch Phú Quốc để có chuyến đi trọn vẹn
- ·Kết quả bóng đá Udinese 1
- ·Hà Tĩnh: Kiên quyết không để xảy ra điểm nóng về buôn lậu
- ·Lịch thi đấu U23 châu Á 2024 hôm nay 17/4/2024
- ·Săn vé máy bay đi Trung Quốc tại Traveloka để khám phá điểm đến nổi tiếng ở Bắc Kinh
- ·Gỡ khó cho trường hợp treo nợ thuế thép do bị ấn định thuế